NeRF - Representing Scenes as Neural Radiance Fields for View Synthesis
Introduction
文章提出了 Neural Radiance Fields,即“神经辐射场”,通过用连续的 5 元函数用于表示连续的静态场景(continuous static scenes)。
$$
F_\Theta (\mathbf{x}, \mathbf{d}) = F_\Theta(x, y, z, \theta, \phi)
$$
输入为观察点的信息:
- 观察点的 world frame position $\mathbf{x} = (x, y, z) \in \R^3$
- 观察点的角度 $(\theta, \phi)$,在实现中用等价的单位方向向量 $\mathbf{d} \in \R^3$ 代替
输出为从该观察点沿该方向的:
- 颜色 $\mathbf{c} = (r, g, b)$
- 体素密度 $\sigma$
Preliminaries
基于 Radiance Fields 的 Volume Rendering
在渲染场景时,我们从观察点 $\mathbf{o}$ 沿观察方向 $\mathbf{d}$ 射出一条光线 $\mathbf{r}(t) = \mathbf{o} + t \mathbf{d}$,考虑光线在 $t \in [ t_n, t_f ]$ 范围内的积分:
$$
\begin{aligned}
C(\mathbf{r})
&= \int_{t_n}^{t_f} e^{-\int_{t_n}^t \sigma (\mathbf{r}(s)) \mathrm{d}s} \cdot \sigma(\mathbf{r}(t)) \cdot \mathbf{c}(\mathbf{r}(t), \mathbf{d}) \mathrm{d}t \
&= \int_{t_n}^{t_f} T(t) \cdot \sigma(\mathbf{r}(t)) \cdot \mathbf{c}(\mathbf{r}(t), \mathbf{d}) \mathrm{d}t \
&\in \R^3
\end{aligned}
$$
其中
- $\mathbf{r}(t) \in \R^3$ 是光线在 step $t$ 所在的位置
- $\sigma (\cdot) \in \R$ 是光线的体素密度,即光线在该点处被微小粒子阻断的 differential probability
- $T(t) = e^{-\int_{t_n}^t \sigma (\mathbf{r}(s)) \mathrm{d}s}$ ,代表光线从 $t_n$ 传播到 $t$ 的过程中,不被其他粒子阻断的概率
- $c(\mathbf{x}, \mathbf{d}) = (r, g, b) \in \R^3$ 是在某点 $\mathbf{x}$ 从某方向 $\mathbf{d}$ 看去的颜色值
体素密度信息只和其位置有关,而和观察方向无关(view-independent),而颜色还要考虑观察的方向(view-dependent)。
这可以看成是一种连续的 Alpha Composition。在实现中,可以沿着光线采样,通过 quadrature 计算积分。
Methods
Positional Encoding
实验表明,直接 takes as input the $\mathbf{x}, \mathbf{d}$ 的网络在表示高频的颜色、几何变化时表现并不好。
Rahaman 等人在 2018 年证实了 DNN 更偏向需学习低频的函数,并展示了将原 inputs 通过高频函数映射到高维空间,之后再喂入网络,能让网络更好地包含高频的信息。
不过和与之形似的 Transformer 中的 Positional Encoding 不同,此项目中的这一函数不是为了编码词在句中的位置信息,而是为了调整 inputs 的频域。
因此,此文将 $F_\Theta$ 分解为 $F_\Theta = F_\Theta ‘ \circ \gamma$:
- $F_\Theta ‘$:一个 MLP
- $\gamma$:一个将参数从 $\R$ 映射到高维空间 $\R^{2L}$(准确说是 $[-1, 1] \mapsto [-1, 1]^{2L}$)的函数
$$
\begin{aligned}
\gamma: \R &\to \R^{2L}, \ p &\mapsto \begin{bmatrix} \sin (2^0 \pi p) \ \cos (2^0 \pi p) \ \dots \ \sin (2^{L-1} \pi p) \ \cos (2^{L-1} \pi p) \end{bmatrix}
\end{aligned}
$$
特别地,$\gamma (\cdot)$ 对每个输入参数单独作用:
- 对于位置 $\mathbf{x}$
- 先 normalize: $\hat{\mathbf{x}} = \frac{\mathbf{x}}{\Vert \mathbf{x} \Vert}$
- 然后映射:$\gamma(\mathbf{x}), L = 10$
- 对于方向 $\mathbf{d}$
- 映射:$\gamma(\mathbf{d}), L = 4$
Volume Sampling
在训练过程中,需要将渲染的图像和 groud truth 比较求出 loss。基于前文所述的渲染方法,为了使渲染过程高效、可微分,文章采用了 2 步的层次化分层采样。
Stratified Sampling
在积分区间中,uniformly sample $N$ 个点:
$$
t_i \sim \mathcal{U}[t_n + \frac{i-1}{N}(t_f - t_n), t_n + \frac{i}{N}(t_f - t_n)]
$$
记在每个点 $\mathbf{r}(t_i)$
- 采样间隔 $\delta_i = t_{i+1} - t_i$。
- 体素密度为 $\sigma_i$
- $T_i = e^{- \sum_{j=1}^{i-1} \sigma_j \delta_j}$
则上面的渲染函数变为
$$
\begin{aligned}
\hat{C}(\mathbf{r})
&= \sum_{i=1}^N e^{- \sum_{j=1}^{i-1} \sigma_j \delta_j} (1 - e^{- \sigma_i \delta_i}) \
&= \sum_{i=1}^N T_i (1 - e^{- \sigma_i \delta_i}) \
&\in \R^3
\end{aligned}
$$
Hierarchical Sampling
直接沿着光线的方向分层采样会导致很多实际没有 voxel 的空间与被遮挡的空间被计算。
最重要的信息集中在光线首次碰到物体的位置。
此项目采用了层次化的采样方案,即分粗糙、精细两次采样,并用不同的网络分别计算:
- Coarse Sampling(粗糙采样)
- 在光线上分层采样 $N_c$ 个点
- 通过 coarse network 计算这 $N_c$ 个点的 outputs
- 提取各点的权重 $w_i = e^{- \sum_{j=1}^{i-1} \sigma_j \delta_j} (1-e^{- \sigma_i \delta_i}) = T_i (1-e^{- \sigma_i \delta_i})$
- 这相当于改写了 Alpha Composition:$\hat{C}i(\mathbf{r}) = \sum{i=1}^{N_c} w_i c_i$
- Normalize 权重,构建沿着光线的 piecewise-constant PDF:$\hat{w}i = \frac{w_i}{\sum{j=1}^{N_c} w_j}$
- Fine Sampling(精细采样)
- 在光线上通过 1.d 得到的 PDF 采样 $N_f$ 个点
- 通过 fine network 计算全部 $(N_c + N_f)$ 个点的 outputs
这样的方案使得在同样的采样次数中,可以得到更多的我们希望包含有效视觉内容的样本。
Network
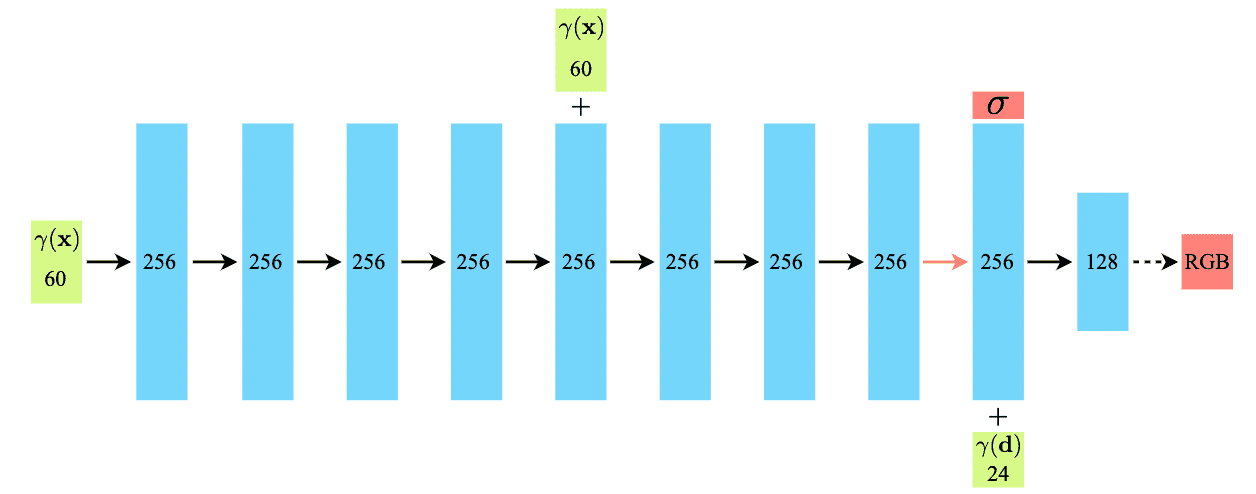
这一工作使用了如下的网络,输入 positional encoded query position $\mathbf{x}$,经过 8 个 256 通道的全连接 FC ReLU 层,并在第 5 层将 ;之后,一个额外的 256 通道的 FC ReLU 层将预测的 $\sigma \geq 0$ 和编码的 feature vector $\in \R^{256}$ 输出;feature vector 再和 positional encoded query view direction $\mathbf{d} \in \R^{24}$ concatenate 成 $280$ 维的 code,最后通过一个 128 通道的 FC ReLU 输出预测的 RGB radiance。
More Implementation Details
每个网络只能存储一个场景,因此要为每个场景单独训练一个网络。
在每个 epoch,为所有像素随机选择一批 camera rays $\mathcal{R}$,然后按照上面的 hierarchical sampling,从 coarse network 采样 $N_c$ 个点、从 fine network 中采样 $(N_c + N_f)$ 个点,并按照上面的 volume rendering 为两组点渲染颜色,并计算和 ground truth 的 SE loss:
$$
\mathcal{L} = \sum_{\mathbf{r} \in \mathcal{R}} \left[ \left\Vert \hat{C}_c (\mathbf{r}) - C(\mathbf{r}) \right\Vert_2^2 +\left\Vert \hat{C}_f (\mathbf{r}) - C(\mathbf{r}) \right\Vert_2^2 \right]
$$
Results
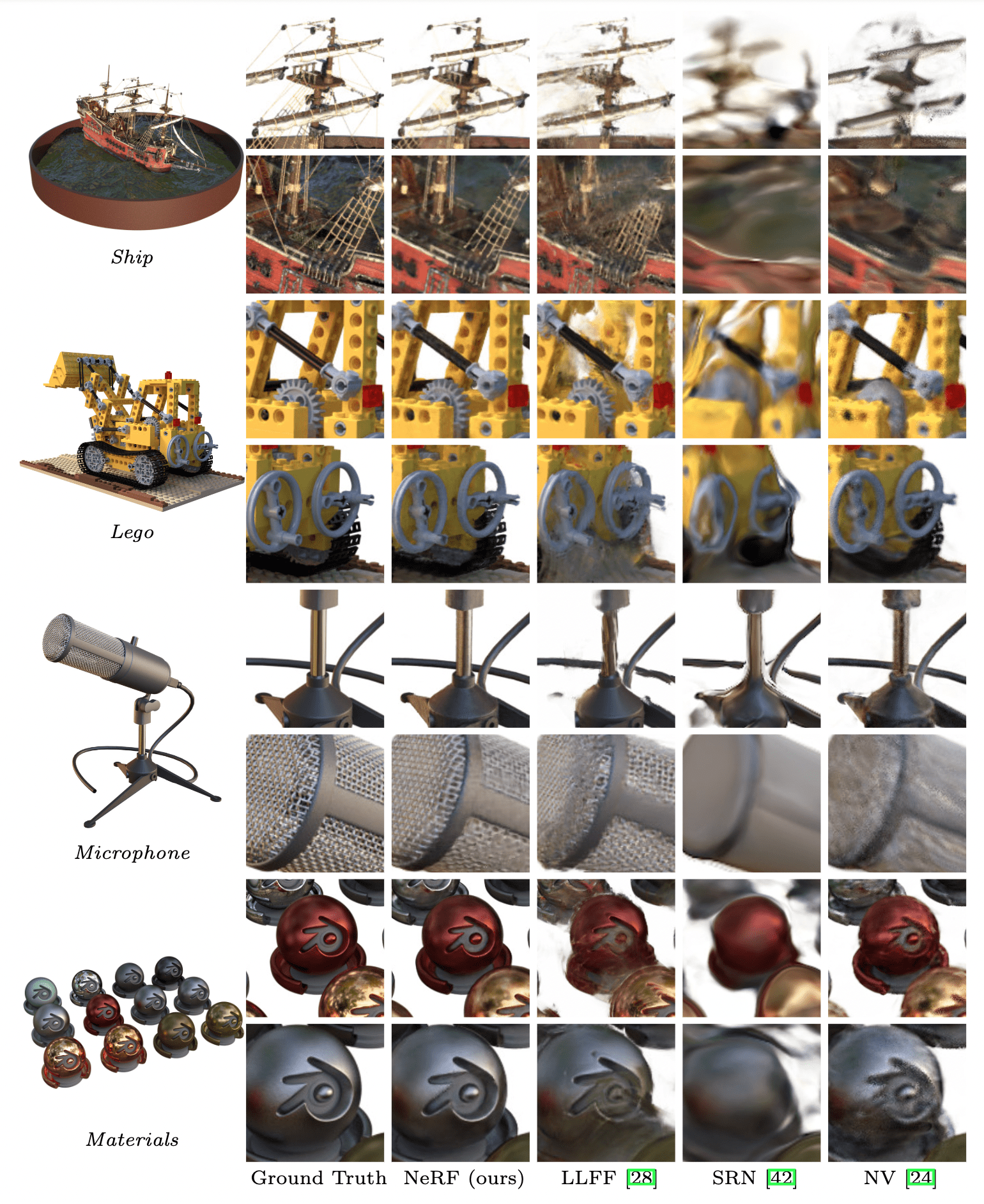
将 NeRF 和LLFF、SRN 等方法对比。
物体:
场景:
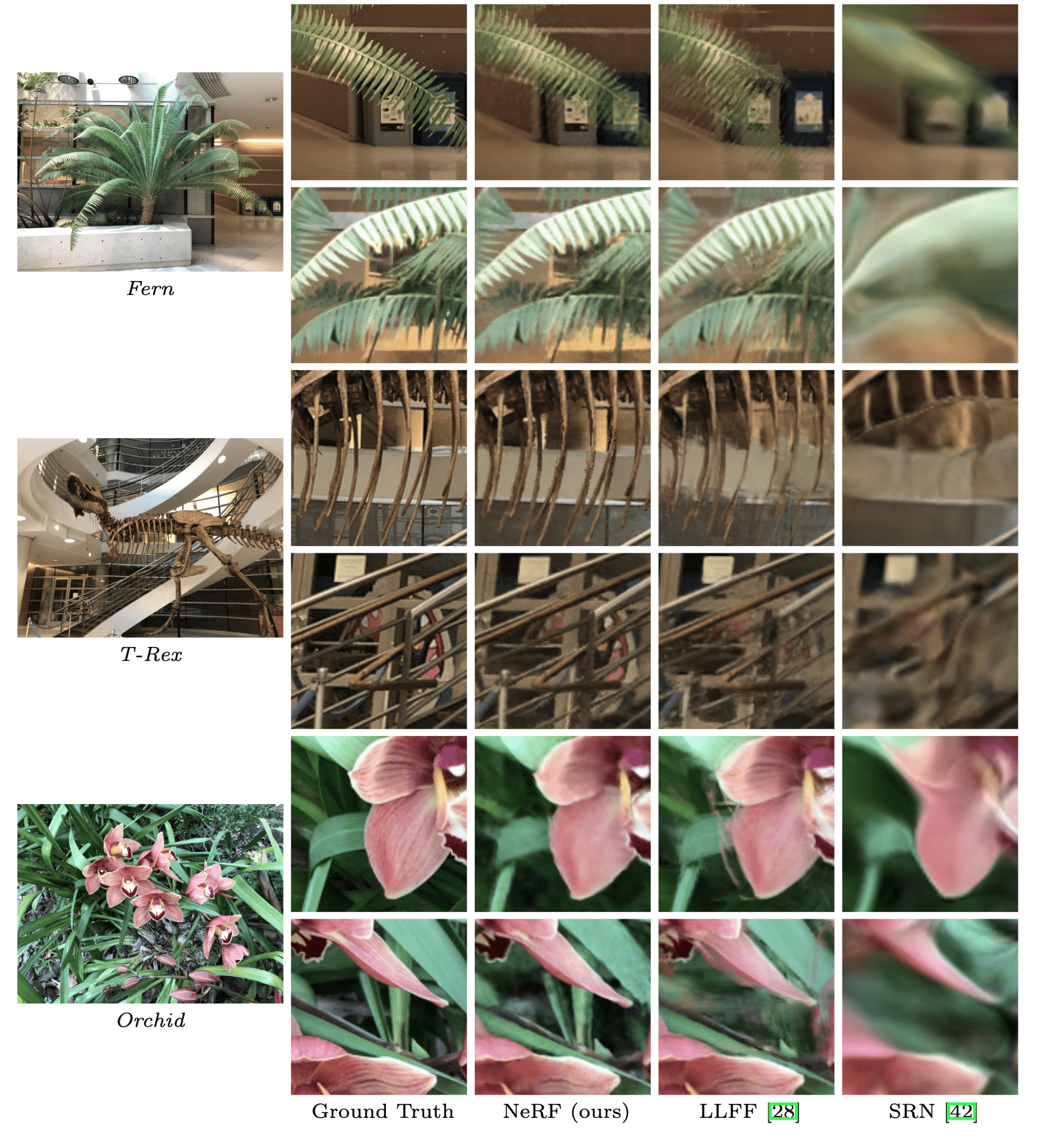
不难看出,这一工作可以很好得将几何和图形细节还原,在反射、边缘、锐度等方面较良好。
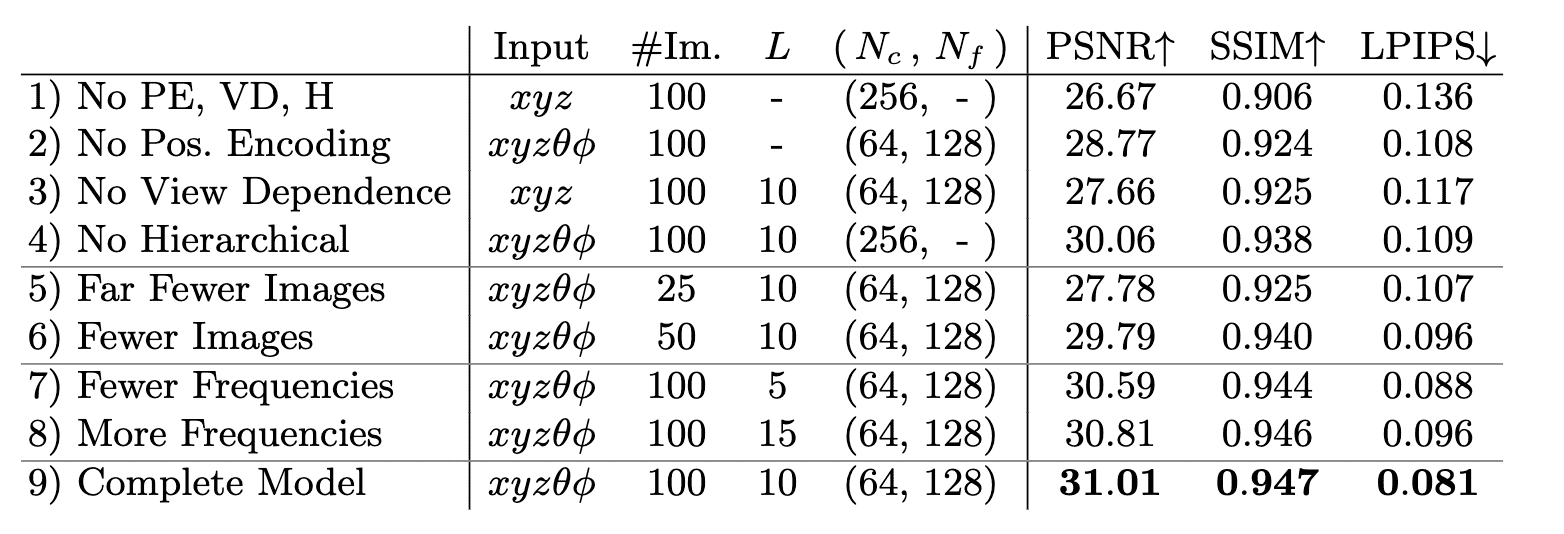
Abalation
这一工作针对 Position Encoding、View Dependence、Hierarchical 等过程展开了 ablation study,metric 为 8 个场景的平均 loss:
Contributions
神经辐射场的主要 contributions (文章自己提到的):
- 提出了一种用 MLP 参数表征具有复杂几何与材料的连续场景的方法
- 一种兼容经典体素渲染技术的可谓渲染方法
- 将输入的 5D coordinate 映射到高维位置空间,使得网络可以学到场景中的高频信号
- 参考:
- F-Principle:初探理解深度学习不能做什么 - 知乎 (zhihu.com)
- [如何从频域的角度解释CNN(卷积神经网络)? - 知乎 (zhihu.com)](
- 参考: